Development of portable articulated arc welding robot
0 Preface
Welding is one of the basic production methods in the mechanical manufacturing industry, and it is crucial to improve the stability and reliability of welding quality. Due to economic and technical reasons, China's welding production operations are basically manual operations. By manual operation, not only the welding workload is large, the welding productivity is low, the welding quality fluctuates greatly, and the working environment is bad, the working conditions are poor, and the labor intensity is large. Arc and noise during welding 1 Universal arc welding robot
Tone, smoke and dust 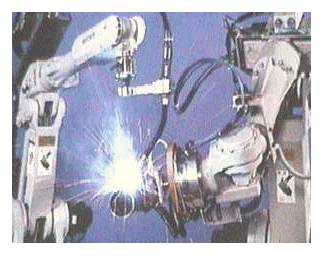 Take care of the health of workers. With China's accession to the WTO and international standards, it is very urgent to promote “health, safety, environmental protection†or “HSE†management in industrial enterprises to improve the working environment of workers in welding. The use of automatic welding technology is the only way to change the above situation. As an extension of human limbs, industrial robots can tirelessly engage in hard and heavy labor in an environment in which workers cannot operate, so that production workers can get rid of dangerous and harmful working conditions and reduce the labor intensity of production workers [1] , is the best automated tool to replace the welding operation of workers. The general-purpose arc welding robot consists of mechanical system, control system and drive system as shown in Figure 1. At present, the widespread use of general-purpose arc welding robots is also limited: the general-purpose arc welding robot is expensive, and the one-time investment risk is large; the structure is a split structure, large in size, heavy in weight, inconvenient to move flexibly, suitable for The flow production line is used in the fixed welding station; the control program development method mostly uses teaching programming or robot language programming. Due to the limited knowledge structure of the production workers in China, it is not enough to master the development control program with teaching programming or robot language programming. .
Take care of the health of workers. With China's accession to the WTO and international standards, it is very urgent to promote “health, safety, environmental protection†or “HSE†management in industrial enterprises to improve the working environment of workers in welding. The use of automatic welding technology is the only way to change the above situation. As an extension of human limbs, industrial robots can tirelessly engage in hard and heavy labor in an environment in which workers cannot operate, so that production workers can get rid of dangerous and harmful working conditions and reduce the labor intensity of production workers [1] , is the best automated tool to replace the welding operation of workers. The general-purpose arc welding robot consists of mechanical system, control system and drive system as shown in Figure 1. At present, the widespread use of general-purpose arc welding robots is also limited: the general-purpose arc welding robot is expensive, and the one-time investment risk is large; the structure is a split structure, large in size, heavy in weight, inconvenient to move flexibly, suitable for The flow production line is used in the fixed welding station; the control program development method mostly uses teaching programming or robot language programming. Due to the limited knowledge structure of the production workers in China, it is not enough to master the development control program with teaching programming or robot language programming. .
The price, structure and development of control programs for general-purpose arc welding robots have largely restricted the application and promotion of general-purpose arc welding robots. Therefore, under the current conditions in China, whether it is possible to use arc welding robots in non-fixed welding stations or field welding is a subject worth exploring. The author believes that: using mechatronics technology combined with computer hardware and software, develop portable arc welding robots with low price, small size, light weight, compact structure and flexible movement; develop control software in graphical simulation mode to simplify control software development In this way, arc welding robots can be used in non-fixed welding stations or in field welding. The portable arc welding robot introduced in this paper, with MC68HC908GP32 microprocessor as the core, uses the curing control software to control the portable arc welding robot to complete the welding production operation, which provides a valuable reference for the application and promotion of arc welding robot. This paper briefly introduces several key technical issues of mechanical structure, control system hardware and control software development of portable arc welding robot.
1 portable arc welding robot mechanical hardware
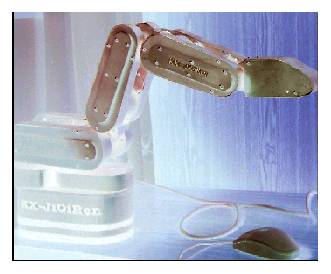 The biggest feature of arc welding robot application is: Figure 2 Portable arc welding robot prototype with control software
The biggest feature of arc welding robot application is: Figure 2 Portable arc welding robot prototype with control software
The change, replacing the complex mechanical structure and electrical structure changes, enables the arc welding robot to complete the arc welding production operation flexibility. Therefore, according to the viewpoint of flexible manufacturing, the hardware of the arc welding robot—the boom, the arm, the wrist, the fuselage together with the control electrical hardware, and the robot controller are all designed and manufactured as an electromechanical integrated functional module structure [2] . The arc welding robot uses the user to complete the specific welding production operation according to the needs of the enterprise, purchases the electromechanical integrated function module of the arc welding robot, assembles into a special portable arc welding robot, avoids redundant degrees of freedom, and makes the portable arc welding robot compact and weight. Light, cheap, and easy to move. Figure 2 shows a prototype of a portable arc welding robot assembled using a mechatronic functional module.
2 portable arc welding robot control hardware
In order to adapt to the use of mechatronics functional modules, assembled into a variety of portable arc welding robots by means of "building blocks", the portable arc welding robot control hardware uses a microprocessor as the control core, and it is obvious that in order to adapt to the addition and subtraction of mechanical and electrical integration modules To extend the capabilities of portable arc welding robots, the control system hardware must be scalable, including:
a . The microprocessor provides more I/O ports. Without extending the programmable input/output interface, it can “hook†multiple arm modules, drive multiple arm modules at the same time, and reserve I/O ports. Easy to expand portable robot functions (expanded into portable detection robots, etc.)
b . The servo system of the mechatronics arm function module is embedded in the arm body. The microprocessor must have a large-capacity on-chip flash memory and RAM, and the memory can be expanded to reduce the volume of the servo system.
The portable arc welding robot control system core MC68HC908GP32 microprocessor chip can form 5 I / O ports, with 3 ports to control 3 arm modules, an I / O port control wrist DC motor, an I / O port control Wrist stepper motor.
3 portable arc welding robot control principle
In the welding production, through the path planning, the arc welding robot completes the welding production tasks mostly in sequence, and the trajectory of the finished arc welding production operation is generally known, or the motion trajectory can be decomposed into a plurality of single motion trajectories. In combination, a given motion trajectory can be synthesized by controlling each single motion trajectory. Therefore, by mathematical model, the inverse solution of the arc welding robot can be solved mathematically, and the motion and path of the arc welding robot can be transformed into the “predetermined†trajectory and attitude, and the control program can be developed by offline programming. , when the arc welding robot is controlled to perform real-time compensation. This kind of control method avoids the high-performance requirements of the general-purpose arc welding robot using real-time sampling and real-time calculation, so that the arc welding robot can be controlled by the low-cost control system, and the price of the arc welding robot is greatly reduced.
 The electromechanical arm function module is used to assemble the portable robot with the "building block" method. When the welding production operation is completed, the position and posture of the welding tool are controlled, which is essentially the rotation angle and rotation of the stepping motor shaft. Coordinated control of speed, the basic principle and formula of stepper motor:
The electromechanical arm function module is used to assemble the portable robot with the "building block" method. When the welding production operation is completed, the position and posture of the welding tool are controlled, which is essentially the rotation angle and rotation of the stepping motor shaft. Coordinated control of speed, the basic principle and formula of stepper motor:
     θ=360/Z
Where: θ - step angle
           Z- stepper motor rotor teeth
It can be seen that each time a drive pulse is input, the motor shaft is stepped by one step angle increment, so:
a , the rotation angle of the stepping motor shaft is proportional to the number of pulses input;
b . The speed of the stepper motor shaft is determined by the frequency of the input pulse.
The stepping motor can convert the input pulse into a rotary motion. Its unique high precision, no drift, no cumulative error, etc. make it the only servo and actuator that can use open loop control technology in the motor integrated product. . Obviously, the motion control of the portable arc welding robot is the coordinated control of the number of input pulses and the pulse frequency of the stepping motor.
4 Portable robot control software development
The development method of robot control software directly restricts the application and promotion of robots. The rapid and simple development method not only promotes the application and promotion of robots, but also directly determines the flexibility of robots to complete production operations. Portable arc welding robots are used by production workers as smart tools and must simplify the development of control software.
In order to meet the requirements of real-time control, programming in assembly language; development interface for mapping control program
After the structural change of the portable arc welding robot or the improvement of the production process, the need to quickly develop the control program, the "Portable Robot CAD System" software was developed in Visual Basic language, and the development of the control software was carried out under the support of the "Portable Robot CAD System". [3] , the development interface is shown in Figure 3. Input the parameters of each function module in the visual human-machine interface, repeatedly call the menus at all levels, optimize the structural parameters of the arc welding robot; visually observe and compare the various types of data of the robot simulation graphics and calculations; simulate the arc welding by means of graphical simulation The robot's production movement and trajectory automatically complete the control program design and download to the robot controller while simplifying the development of the control program. The control program is developed under the support of “Portable Robot CAD Systemâ€, and only the corresponding menu is clicked with the mouse, and all the robot expertise and technology related to the robot interpolation algorithm and the inverse kinematics algorithm are all managed by the “Portable Robot CAD System†software. deal with. This kind of graphical simulation develops control software to enable portable arc welding robots to adapt to a variety of welding production operations, making welding production operations flexible. Developing control software in graphical simulation is like using a Windows graphical interface to operate a microcomputer, enabling people who are not familiar with robot hardware to develop robots quickly and easily.
Control software to promote the application and promotion of robots.
After the power-on reset of the portable arc welding robot control system, the solidified control software starts to run, after the system is initialized:
a . The control software reads the rotation angle values ​​of the boom, the arm and the wrist. After the calculation, the stepper motor forward, reverse, acceleration, and deceleration subroutines are called, and a continuous series of pulse signals are output to the corresponding I/O ports to control Big arm, arm, wrist rotation;
b . The control software reads in the value of the collected labeling operation state, compares the value with the target value read from the specified address, and calls the boom, the arm, the wrist position, and the attitude compensation subroutine according to the difference, Compensation for the rotation of the arms, arms, and wrists;
c . Due to external interference, when the welding tool of the portable arc welding robot deviates or moves away from the predetermined trajectory, the control software reads in the value of the collected marking operation state, and compares the value with the target value read from the specified address, according to the difference The value calls the boom, arm, wrist plus, deceleration compensation subroutine to compensate for the acceleration and deceleration of the boom, arm and wrist.
4 Conclusion
Relying on the high performance of the MC68HC908GP32 microprocessor chip, a portable arc welding robot with low cost, small size, light weight, flexible movement and simple control software development was developed. The prototype experiment shows that the motion function and control precision of the portable arc welding robot meet the requirements of automatic welding of arc welding. The machine is compact in structure, light in weight, easy to carry and flexible to move, multi-purpose, multi-purpose, developable, easy to develop control software, and low in production cost, which essentially makes the machine a smart automatic welding tool. The welding machine type function combination is carried out under the operation of the operator, the control program is developed, and the positioning is "cleared" before the automatic welding. This machine is just a substitute for people to complete heavy and harmful welding operations to improve the quality of welding, rather than completely replacing human labor. In a country with a large population in China, reducing the labor intensity of production operations and improving the quality of production operations is the purpose of implementing automation and the guiding ideology for developing portable arc welding robots.
Solar Separated Street Light,Solar Street Lights Different Power,Solar Street Lighting System,Solar Powered Street Lights
Yantai LUHAO Lighting CO.,Ltd , https://www.luhaosolar.com